自動操舵
「自動操舵」で労力を減らす!
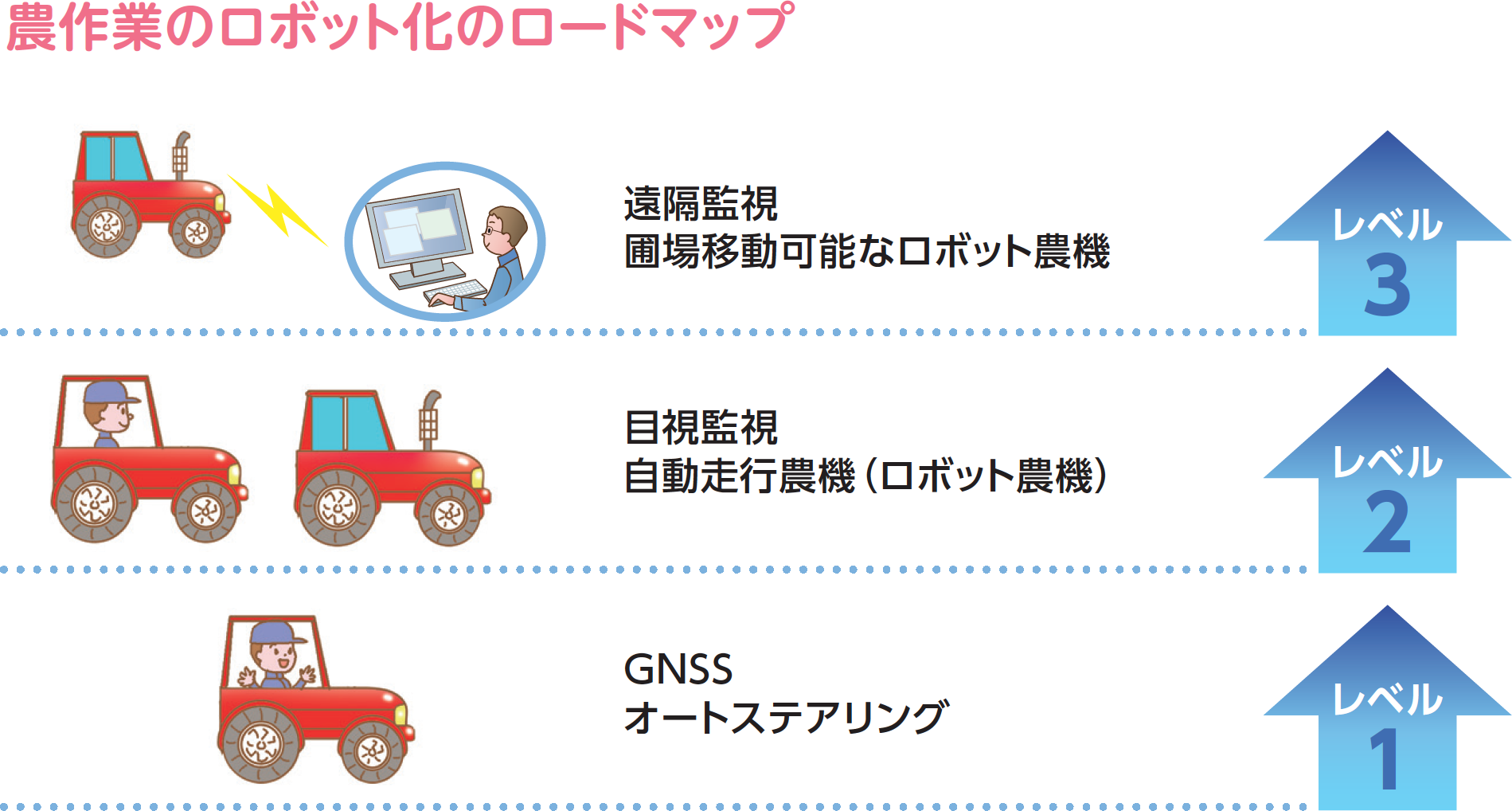
ロボット農機(車両ロボット)の研究はレベル1、レベル2、レベル3に分けて進められています。レベル1では、乗っている人間がほとんど運転することなく、トラクターがGNSSを使った自動操舵(操縦)によって経路を正確に走行します。これを「オートガイダンスシステム」といいます。田畑の大規模化が進んでいる中、人間がトラクターの運転に長時間集中する必要がなくなり、労力の低減を実現します。
4つの機器から構成される自動操舵
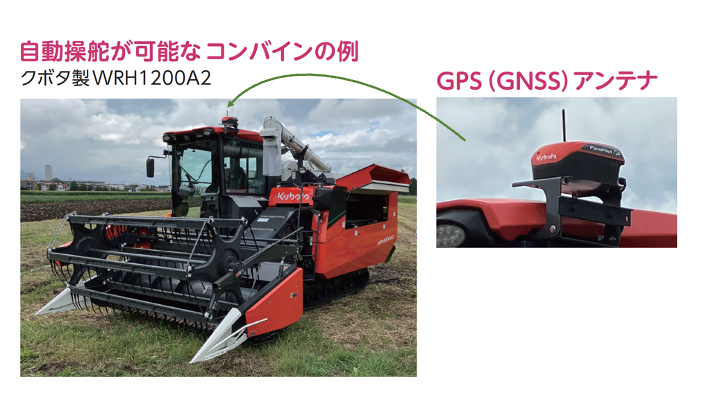
自動操舵は「GPS(またはGNSS)オートガイダンス」とも呼ばれ、システム本体のほかに以下の4つの機器から構成されます。
●GPS(GNSS)アンテナ
……衛星からの位置情報を得る
●オートステアリング
……位置情報にもとづいて、設定された経路を走行するよう自動的に操舵するシステム
●車体傾きセンサー
……不整地の走行における車体の傾きを検知して補正
●スマートフォン

自動操舵の手順 ──圃場登録と作業内容のセッティング
トラクターによる耕耘作業を例に、自動操舵の手順を見ていきましょう。まずは「圃場登録」です。作業を行う圃場を、トラクターのキャビンにあるディスプレイを使って登録します。次に、人間がトラクターを運転して圃場の外周を実際に走らせ、圃場の位置や形をシステムに記憶させます。その後、作業内容のセッティングをディスプレイを使って行います。
画像上:ディスプレイ上で圃場の名前などを設定
画像下:実際に圃場を走行し、圃場の位置や形状を記憶させる

重複せずにまっすぐな耕耘ができる
実際の作業では、直線走行の際は人間はトラクターを運転する必要はありません。トラクターはまっすぐな軌跡で、一定の速度で自律的に走行するため、重複することなく耕耘は進められ、単位面積あたりの作業時間を短縮できます。また、トラクターの運転になれていない人でも、熟練者と同じくらいの精度と速度で作業できるようになります。
画像:重複することなく、まっすぐな軌跡で耕耘作業を行っている