農作業ロボット
人が近くで監視する レベル2
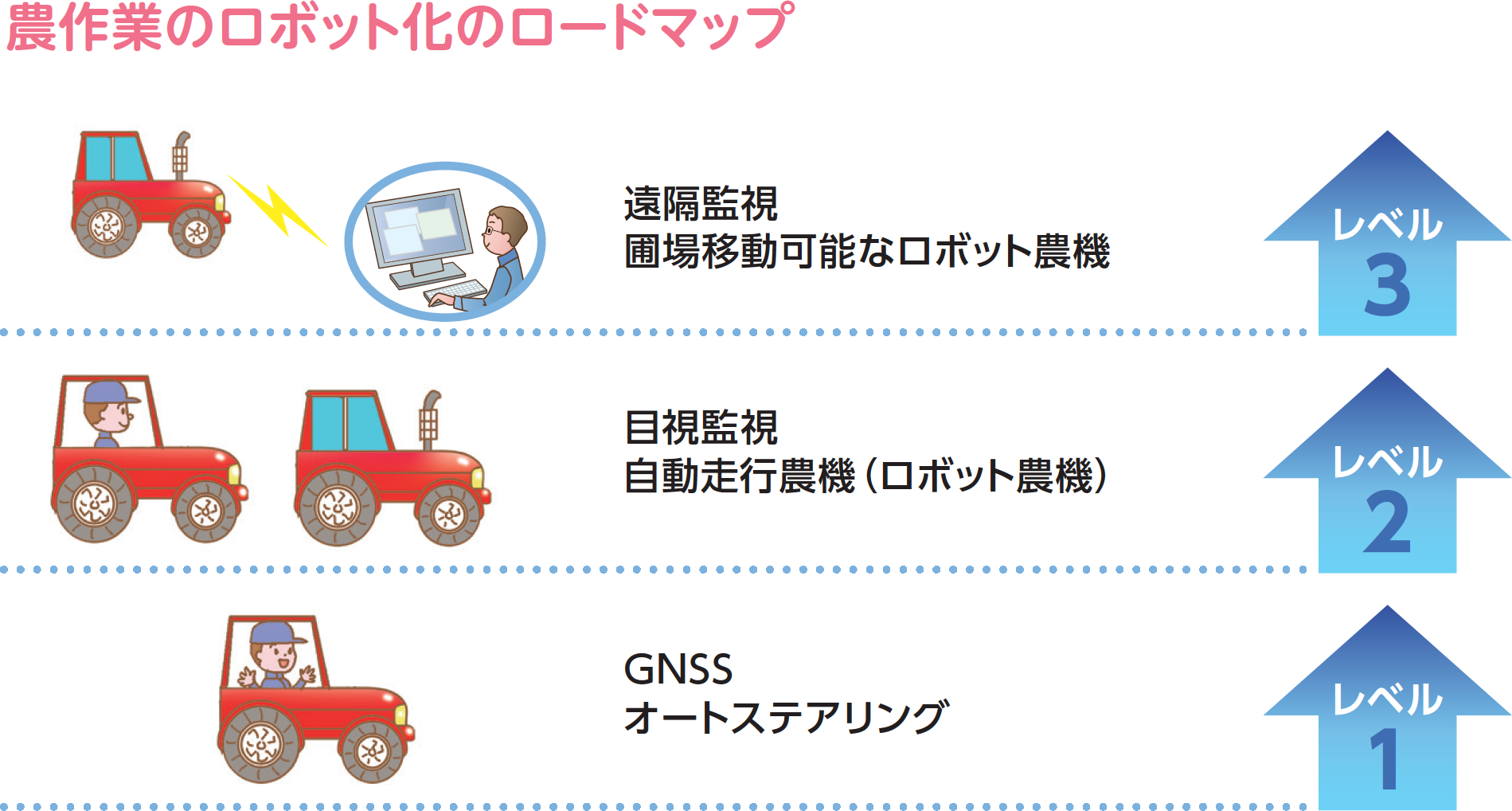
ロボット農機(車両ロボット)の研究はレベル1、レベル2、レベル3に分けて進められています。レベル2では、人間が目のとどく範囲にいて農作業ロボットを監視するか、農作業ロボットといっしょに作業を行う有人トラクターなどに人間が乗って並走または追走して監視します。つまり、有人監視下での運用です。
追走で工程省略も可能!
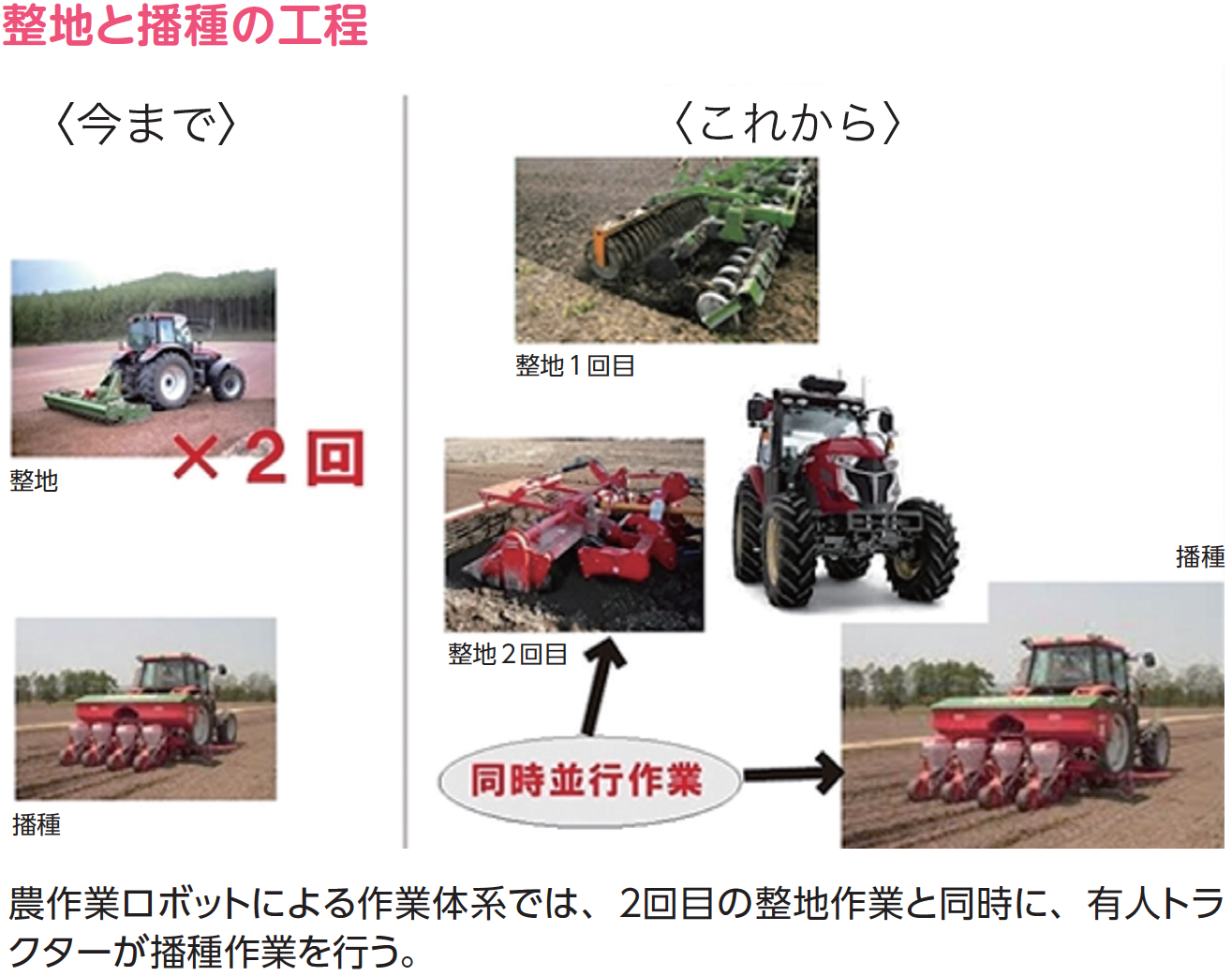
大豆の栽培を例にとります。今までならパワーハローなどの器具を使って整地を2回行ったあとで播種(種まき)作業を行います。これに対して農作業ロボットを使用する場合は、1回目の整地のあと、2回目の整地を行う農作業ロボットの後ろから有人トラクターが追走して播種作業を行うので、効率よく作業を進めることができます。
天候の変化にも柔軟に対応できる
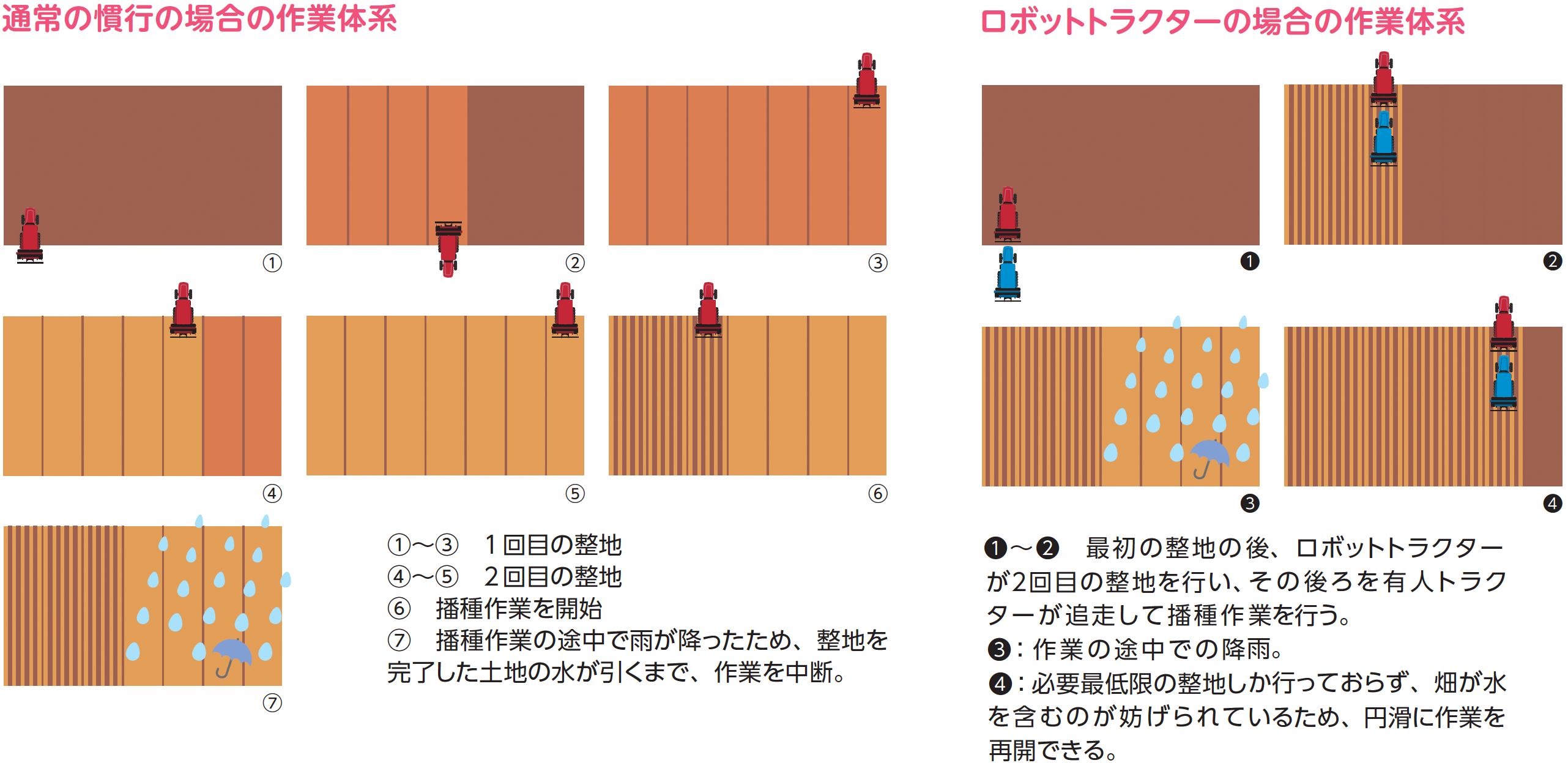
今までのように2回の整地のあとで播種を行う場合、播種の途中で雨が降ると水が引くまで播種作業を中断しなければいけません。これに対してロボット農機を利用する場合は、雨が降っても2回目の整地と播種作業を同時に行うことができます。

レベル2ロボット農機の作業手順①
実際の作業手順を見てみましょう。まずは、GNSSの位置情報と補正情報をロボット農機に送る「GPS(GNSS)受信」です。RTK測位などによるデータはスマートフォンから受け取れます。RTK測位は、常に位置を変化させるロボット農機には最適な測位方式です。次に「圃場登録」で、ディスプレイで登録を行ったあと、実際に畑の外周を一周します。

レベル2ロボット農機の作業手順②
圃場の登録が終わったら、スタートとゴールの位置を設定する「作業領域登録」を行います(画像左上)。そして「作業機の選択と経路作成」です(右上、左下)。こうして作業マップを完成させると、あとはロボット農機が整地作業をはじめます。有人トラクターが追走し、播種作業を同時に実施します(右下)。ロボットトラクターと有人トラクターによる協調作業によって、人員と日数の削減が可能になります。