遠隔監視ロボット農機
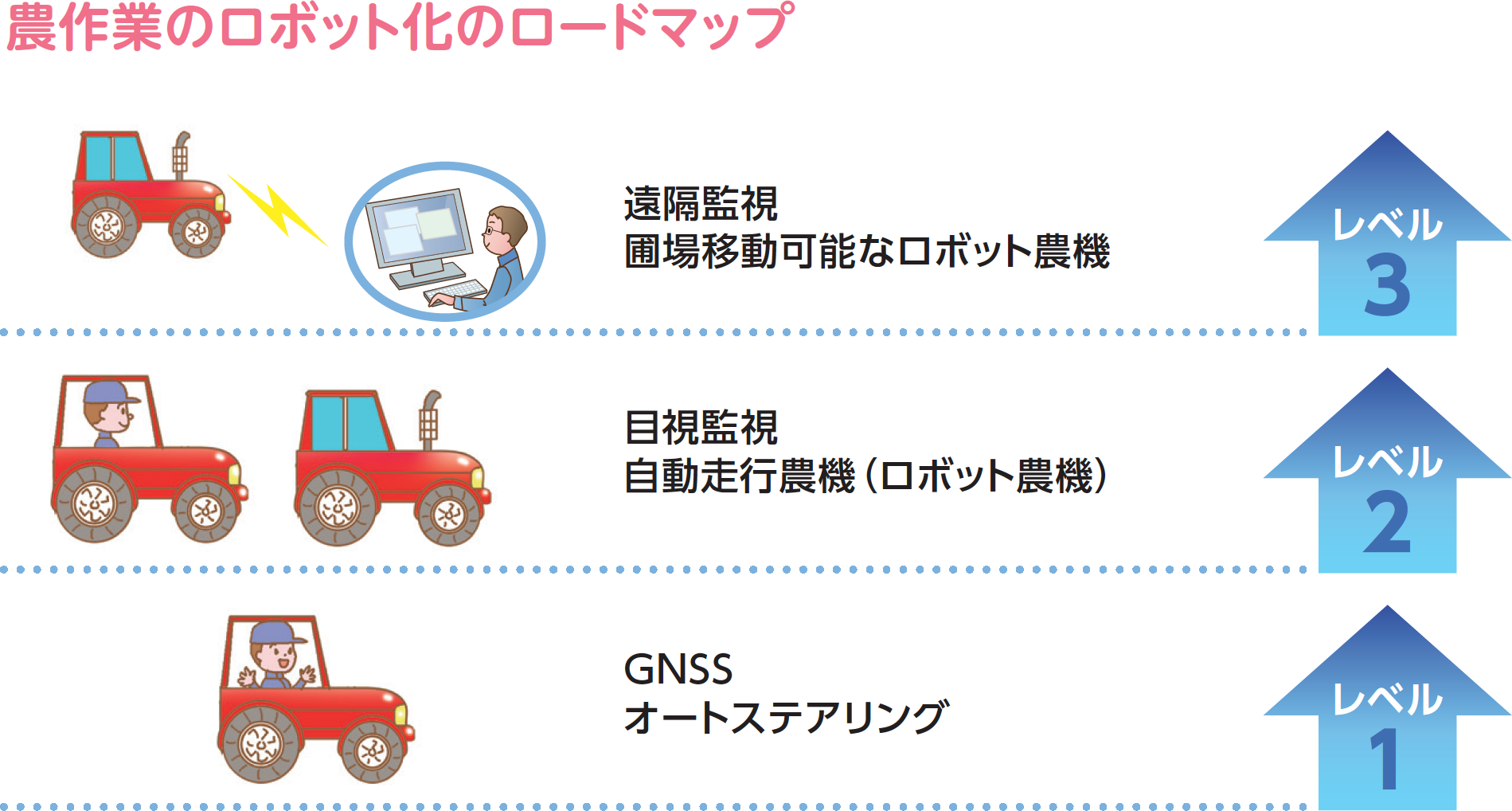
レベル3では「遠隔監視」と「圃場間の移動」ができる
ロボット農機(車両ロボット)の研究はレベル1、レベル2、レベル3に分けて進められています。最高位のレベル3では、圃場から離れたところにある監視センターから監視者1人がモニターで複数のロボット農機を監視するようになります。さらに、ロボット農機が農機置場から圃場へ、また圃場から置場へと移動を自動で行う「圃場間の移動」も特徴の1つです。
実用化には「技術上の問題」と 「法制上の問題」がある
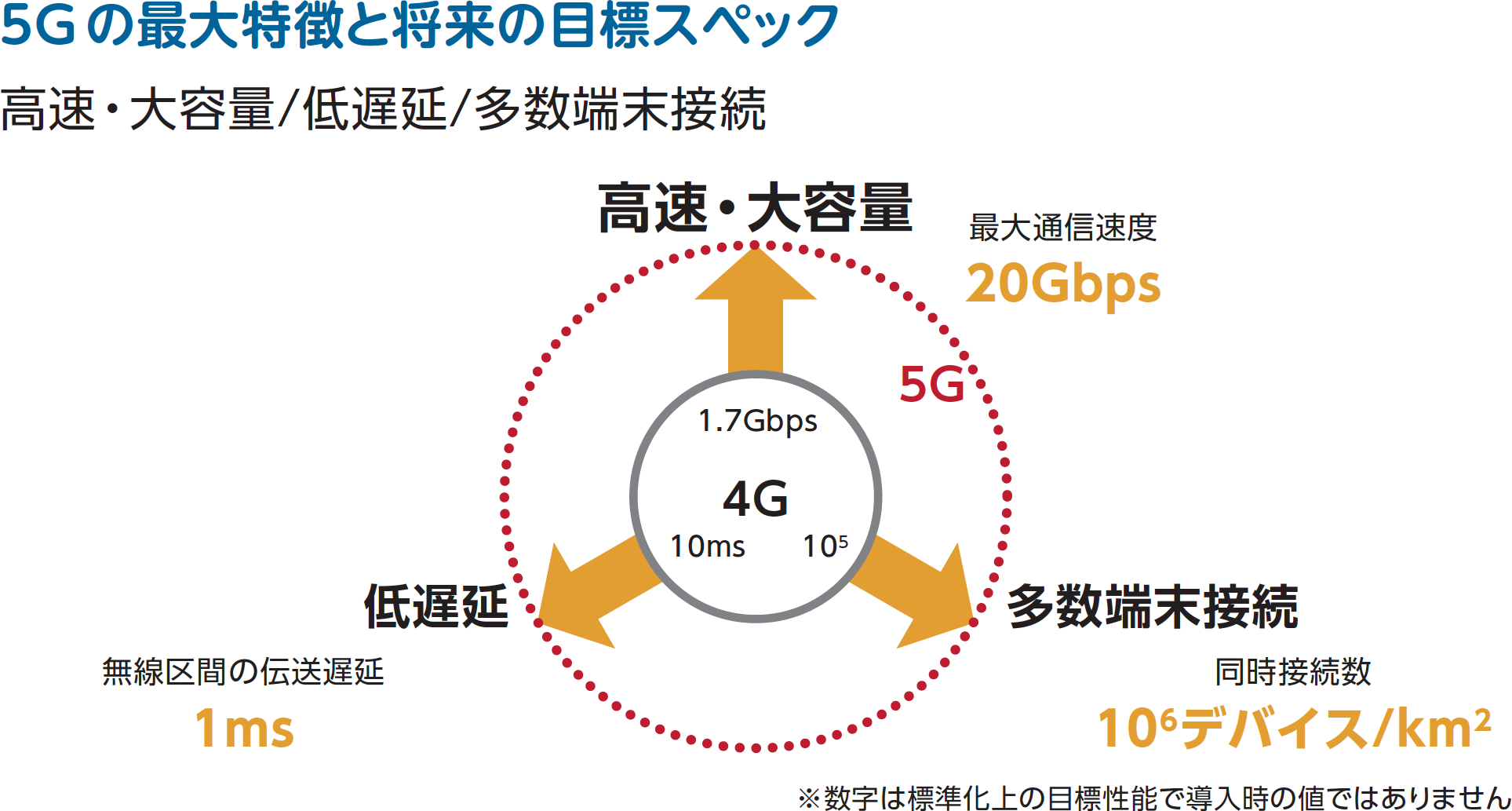
レベル3の遠隔監視ロボット農機を実現させるためには「低遅延の無線伝送」「高速・大容量の通信」という、通信上の課題をクリアする必要があります。また、こうした技術上の問題の他、法制上の問題もあります。道路交通法では、無人車両が一般の公道を走行することを禁止しているため、圃場をつなぐ一般道をロボット農機が走れないという問題があります。
遠隔監視ロボット農機の実証試験①──安全対策
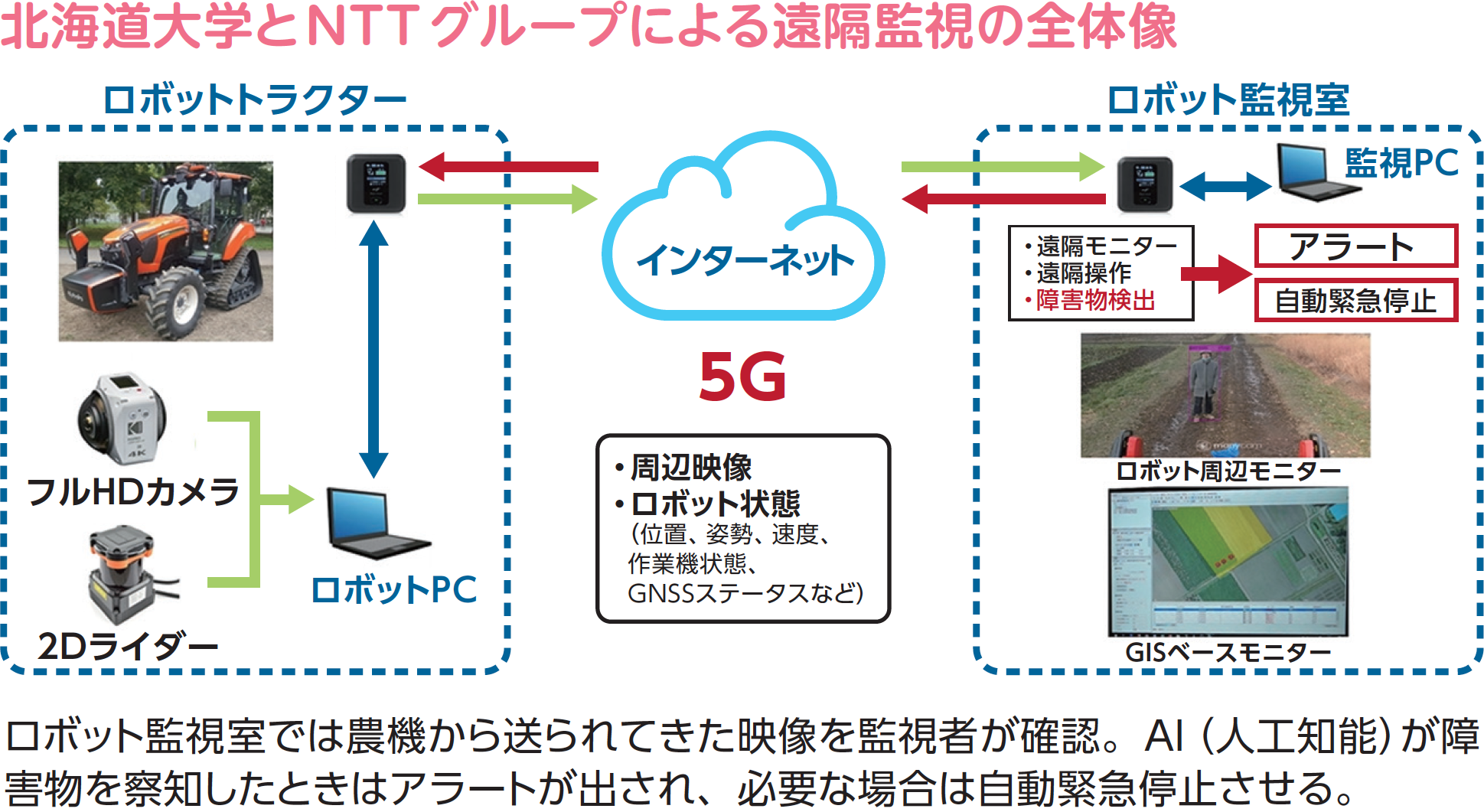
北海道大学(北大)とNTTグループが研究開発している遠隔監視ロボット農機には、稼動のための装備として、高精度で位置を計測できる「RTK-GNSS受信機」と車体の傾きを測るセンサーの「IMU」が搭載されています。この他にも安全センサーとして「フルHDカメラ」と、光で障害物を検知して距離を測る「2Dライダー(LiDAR)」も備えています。この研究用遠隔監視ロボット農機を使って、安全対策の実証実験が行われています。

遠隔監視ロボット農機の実証試験② ──遠距離から複数のロボット農機を監視する
北大は、1人の監視者による複数のロボット農機の監視についての実証試験を行っています。北海道岩見沢市にある監視センターから、37㎞離れた北大の研究農場と7㎞離れた西谷内農場で稼働するそれぞれ2台のロボット農機の制御を行いました。結果としては、1人の監視者が4台の制御を行うのはむずかしく、将来的には監視者のトレーニングや、AIのサポートが不可欠と見られています。
遠隔監視ロボット農機がもたらすものとは?
遠隔監視ロボット農機が実用化されれば、高齢化のために農業を続けられなくなった従事者に代わって遠隔監視ロボット農機による作業やシェアリングを請け負う企業が現れ、そうした「新しいビジネスモデル」が誕生するかもしれません。また、ロボット農機の小型化やAI化が進めば、人手不足の解消のほか、地球規模の遠隔運用を通して世界の食料生産体制の安定化などにも貢献すると見られています。