可変施肥

「ばらつき」に合わせて施肥を行う可変施肥
1つの圃場での作物の生育状況は均一ではなく、ばらつきが出てしまいます。こうした作物の生育や土壌のばらつきに合わせて施肥を行う技術を「可変施肥」といいます。可変施肥を行う場合、まずセンサによるセンシング(観測)でばらつきの情報を入手し、それにもとづいて施肥量を自動的に制御します。 可変施肥は、収穫物の品質を安定化させるとともに、肥料の過剰散布をおさえられます。

2種類ある可変施肥の方法
可変施肥には「センサベース」と「マップベース」の2つがあります。センサベースは、トラクターなどに装備された車載型の生育センサで観測し、施肥機を制御して肥料を散布する方法です。これに対してマップベースは、あらかじめ施肥マップを作り、施肥の際に施肥機がマップ上の位置を認識して散布を制御します。このため、マップベースの場合は位置情報を確認するためのGNSSガイダンスシステムが必要となります。マップベースでは衛星やドローンも使われ、生育だけでなく土壌や収量の観測も行えます。
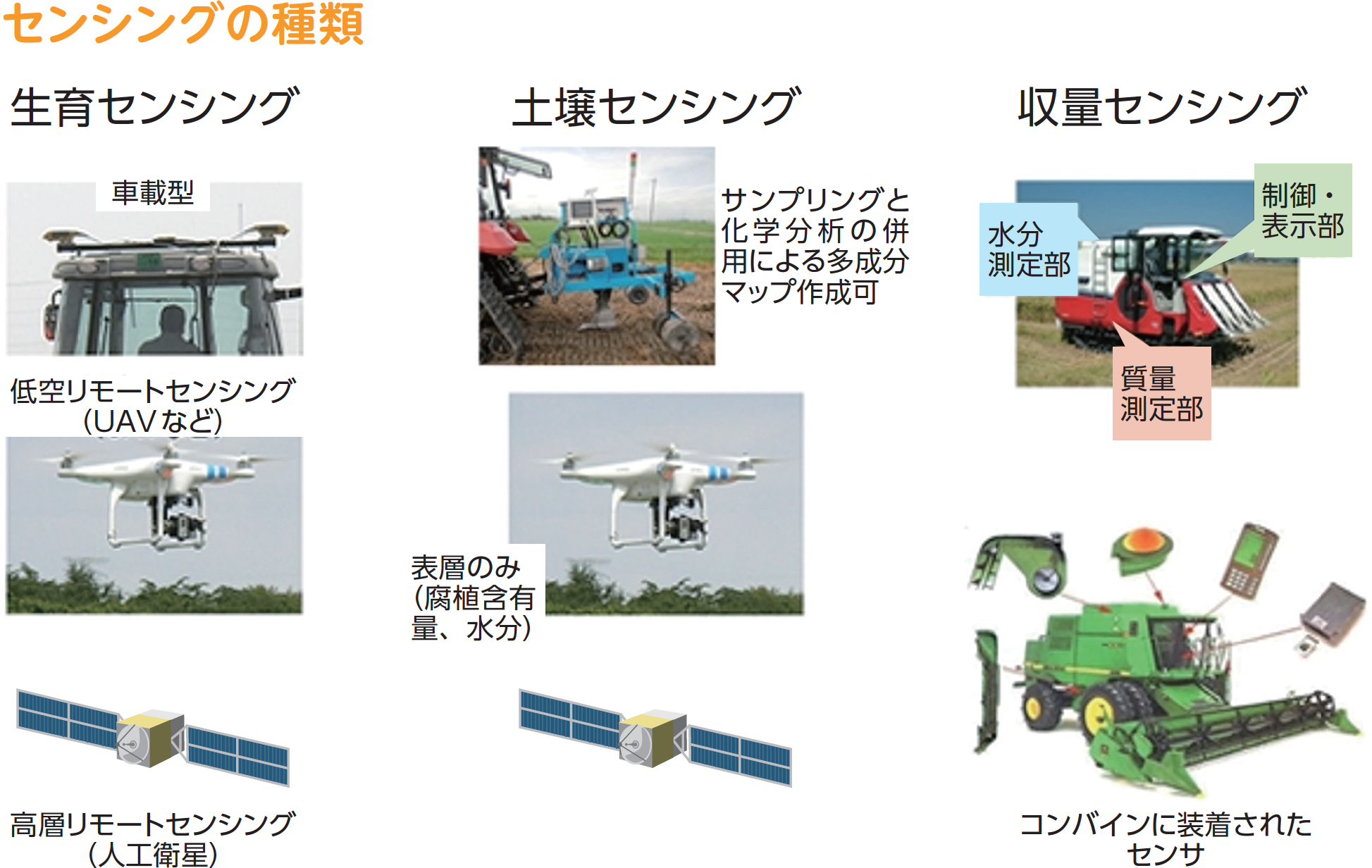
可変施肥で行われる3種類のセンシング
作物の生育や土壌のばらつきを把握するためのセンシング(観測)は3種類あります。作物の生育を観測する「生育センシング」、土壌の状況を観測する「土壌センシング」、収穫物の状態を観測する「収量センシング」です。土壌センシングで車両装着型のセンサを使う場合は土壌のサンプリングと化学分析を行います。
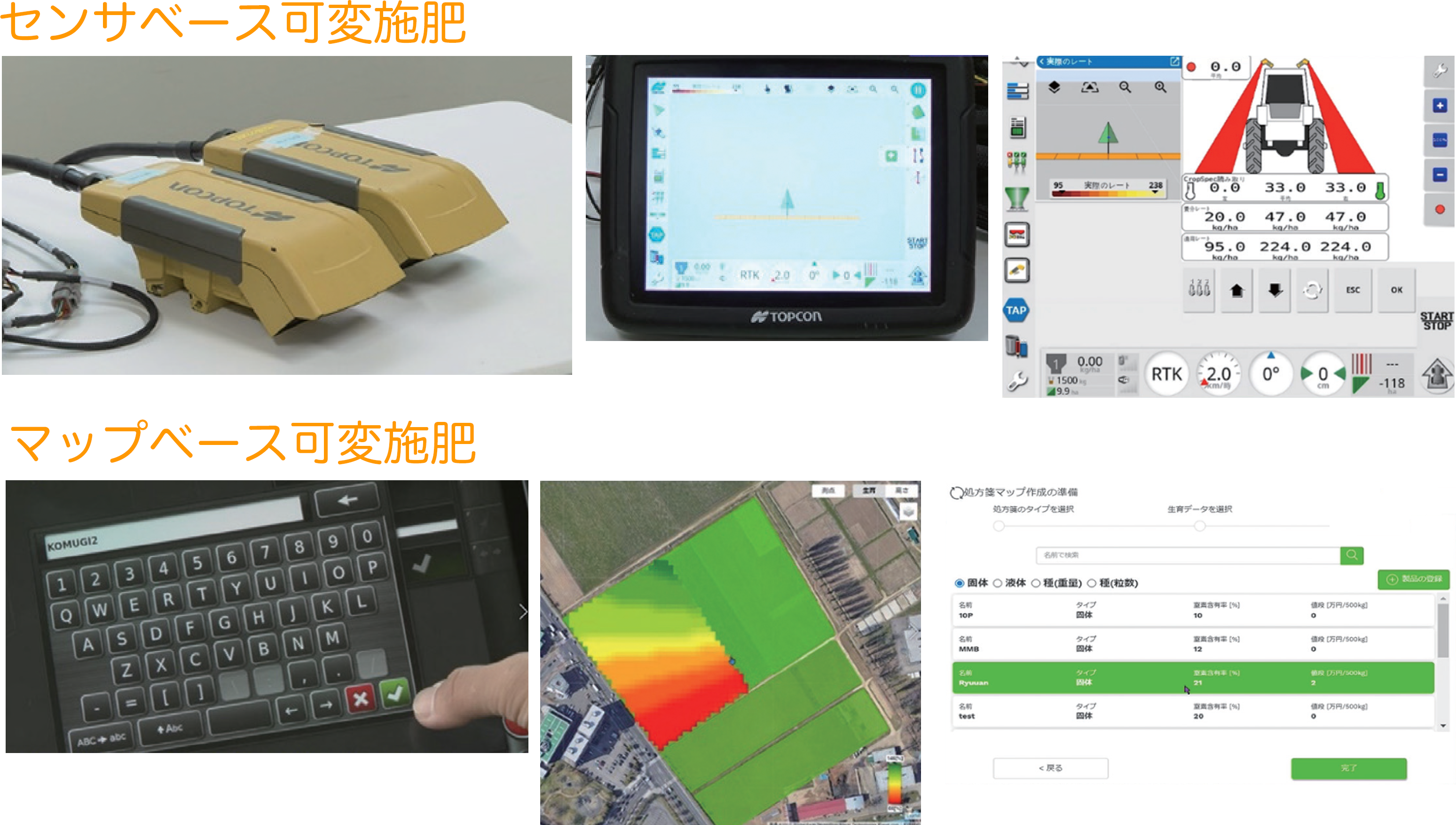
実際の作業手順の一例
センサベース可変施肥では(画像上段)、トラクターなどに搭載された生育センサ(左)のデータをもとにコンソール端末(中)で施肥量が自動的に設定され、実際に肥料をまく作業機に設定が送られます。生育センサのセンシングのようすはコンソールで確認できます(右)。 マップベースの可変施肥では(画像下段)、まず圃場登録をして農機を走行させ(左)、作業機に境界を記録させます。そして圃場の生育データを読み込んで施肥量や使う肥料を決め(中・右)、これをUSBメモリなどで作業機に渡せば、あとは作業機が自動的に施肥を行います。 なお、作業機と操作端末がISOBUS対応なら、作業機の操作やGNSSによる自動操舵を操作端末1台で行えます。
可変施肥を行う上での注意点
たとえば衛星による圃場の可視画像とその作物の生育マップを比べた時、「黒い場所(腐植が多く窒素が多い)ほど生育が良い圃場」と、「黒い場所ほど生育が悪い圃場」があり、前者では腐植と生育の間に正の相関関係が、後者では負の相関関係があると言えます。こうした圃場の状態の判別をよく行うことで、無駄な投資を抑え、効果的な可変施肥を行う必要があります。