車両ロボット

車両ロボットを動かすのに必要な技術
現在、日本農業が抱える人手不足や農家の減少という問題を解決するため、トラクターをはじめとする農業作業機への車両ロボットの導入が進められています。人が操縦しない高い自律性が求められる車両ロボットには、監視装置や安全センサー、システムが正確に動いていることをチェックするユーザーインターフェースなどの技術が用いられますが、ここでは「ナビゲーション」「マップ」「ソフトウェア」の3つを重要な技術として覚えておきましょう。
車両ロボットに必要な技術①──ナビゲーション
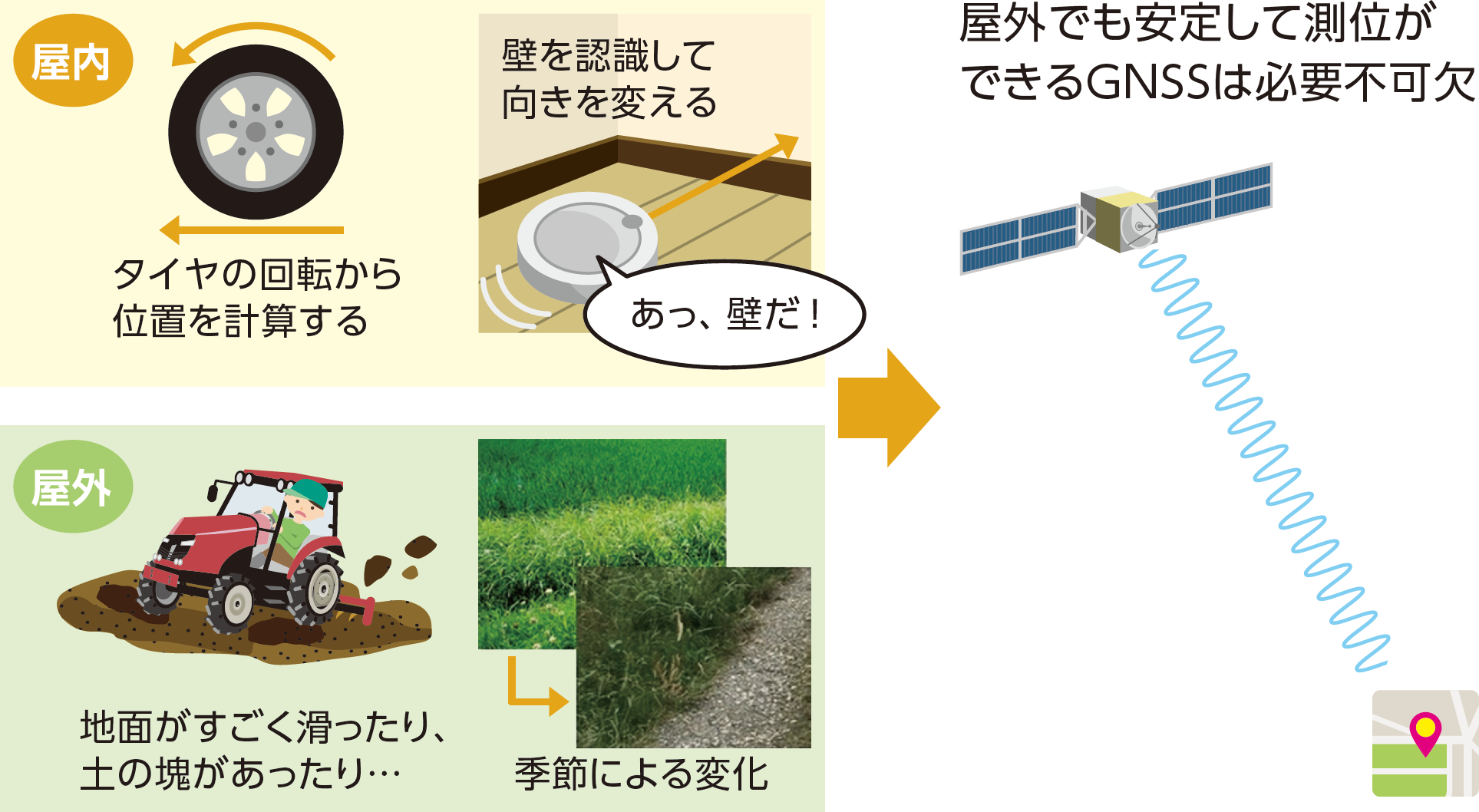
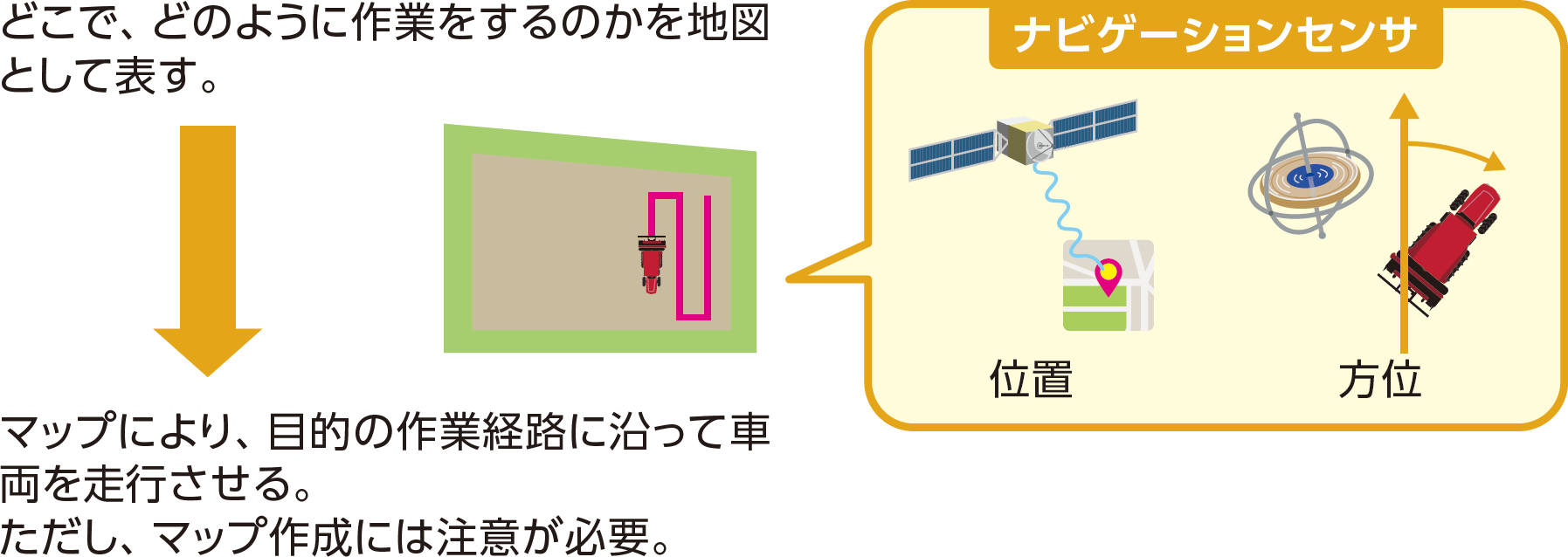
ナビゲーションとは、車両ロボットが自分の「位置」と「方位(車両の向き)」を知るための技術です。位置を知る方法にはタイヤの回転数を数えるなどの方法がありますが、でこぼこの野外では正確に測れません。このためスマート農業の車両ロボットでは、高精度に位置を計測できるGNSS(全地球航法衛星システム)が用いられます。一方、方位を知るには、GNSSの他に、方位磁石のように地磁気を使ったり、ジャイロを用いたりしますが、それぞれ一長一短があります。
車両ロボットに必要な技術②──マップ
ナビゲーションで位置情報と方位情報が得られれば、あとは地図情報と照らし合わせることで車両ロボットを走らせることができます。この地図情報が「マップ」です。マップを作るときは、公的な地図を使う場合は車両ロボットが用いているのと同じ測位方法を用いたものを使うか、そうでなければ車両ロボット自身が圃場を走り、その経路をもとに圃場の区域のマップを作るのが一般的です。

車両ロボットに必要な技術③──ソフトウェア
ソフトウェアは、車両ロボットの前進・後進、エンジン回転数や変速機による速度の調整、方向転換などの制御を行います。この他、車両ロボットに装備されている農機具の昇降や動力の切り替え、危険を察知する安全センサーからの警報を受け車両を緊急停止させるなどの制御もします。
車両ロボットの現在と将来
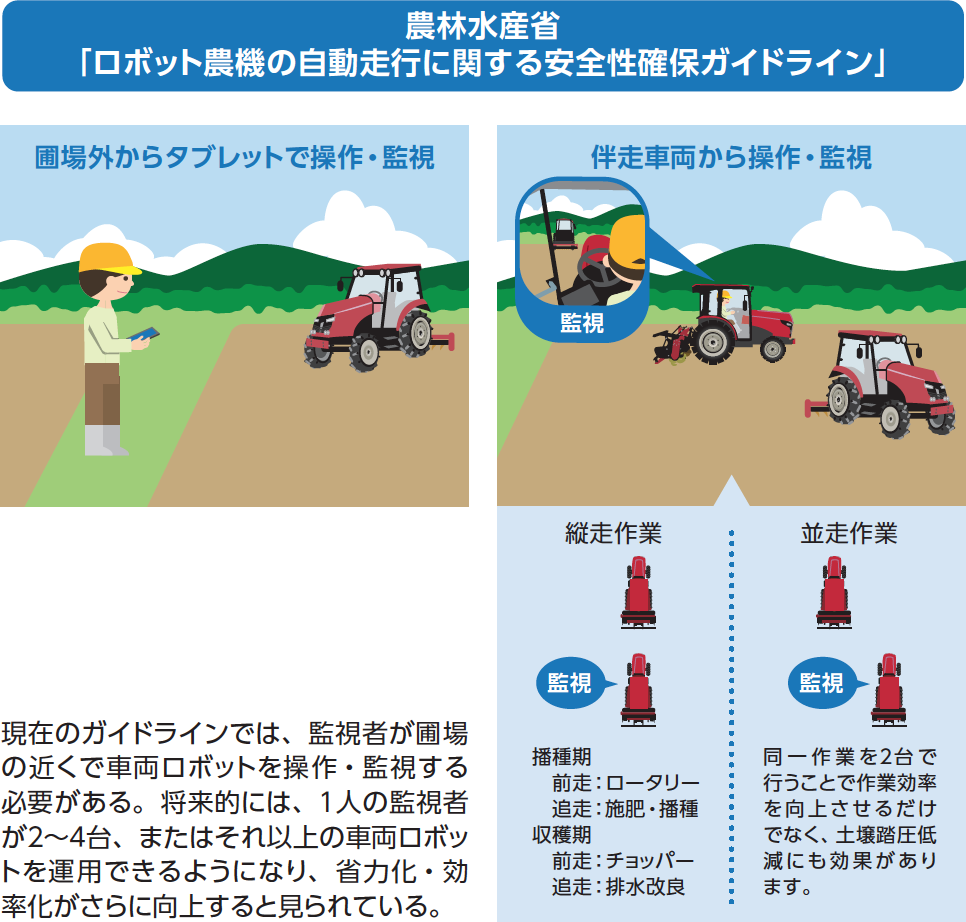
農林水産省が定めた車両ロボットに関するガイドライン(指針)では、車両ロボットの運用は、人が目視で監視できる範囲にいるか、ロボット車両と一緒に走る車両に乗って周辺で監視できる場合と定められています。それでもロボット車両を使えば、人が操縦するよりも約2倍の効率で作業を行えます。将来的には、1人の監視者が離れたところから複数のロボット車両を監視して運用できるようになると期待されています。